新闻中心
News center
让无人机更安全的飞行
发布时间:2019-12-20 作者:master 阅读次数:842
随着无人机在军民用各大领域得到广泛应用。无人机的飞行活动量不断增加,给复杂空域环境内的其他飞行器以及地面第三方带来很大的安全隐患。
无人机可能引发的危害包括空中相撞和地面撞击,其中无人机与有人机之间的空中相撞是首要关注对象。为保障飞行安全,目前各国对无人机的运行管理普遍保持审慎的态度,将无人机限制在特定的空域内,与有人机分开、隔离运行。但在有限的空域资源下,隔离运行方式将难以满足无人机日益增长的应用需求。
为达到与有人机相当的安全水平、将碰撞风险降低至安全目标水平,实现安全的共享空域运行已成为各国共识。民用航空领域目前已形成一套成熟的飞机防撞体系,通过多层防撞策略可以有效降低飞机空中相撞的风险。
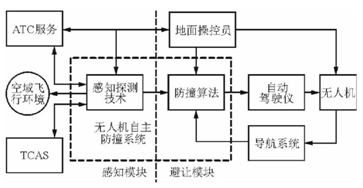
其中“看见避让”是空中航行的基本原则,ATC(空中交通管制)服务、TCAS(空中交通防撞系统)给出的避让建议以及“看见避让”均由飞行员执行,其本质属于“人为避让”。而无人机的防撞策略则更偏重于“机器避让”,目前普遍应用的无人机隔离运行方式属于程序防撞策略,这主要依赖于感知探测技术与防撞算法本身。无人机自主防撞系统架构如下图所示。
无人机可能引发的危害包括空中相撞和地面撞击,其中无人机与有人机之间的空中相撞是首要关注对象。为保障飞行安全,目前各国对无人机的运行管理普遍保持审慎的态度,将无人机限制在特定的空域内,与有人机分开、隔离运行。但在有限的空域资源下,隔离运行方式将难以满足无人机日益增长的应用需求。
为达到与有人机相当的安全水平、将碰撞风险降低至安全目标水平,实现安全的共享空域运行已成为各国共识。民用航空领域目前已形成一套成熟的飞机防撞体系,通过多层防撞策略可以有效降低飞机空中相撞的风险。
其中“看见避让”是空中航行的基本原则,ATC(空中交通管制)服务、TCAS(空中交通防撞系统)给出的避让建议以及“看见避让”均由飞行员执行,其本质属于“人为避让”。而无人机的防撞策略则更偏重于“机器避让”,目前普遍应用的无人机隔离运行方式属于程序防撞策略,这主要依赖于感知探测技术与防撞算法本身。无人机自主防撞系统架构如下图所示。